Edge Detection
Edge Detection
Gradients of Images
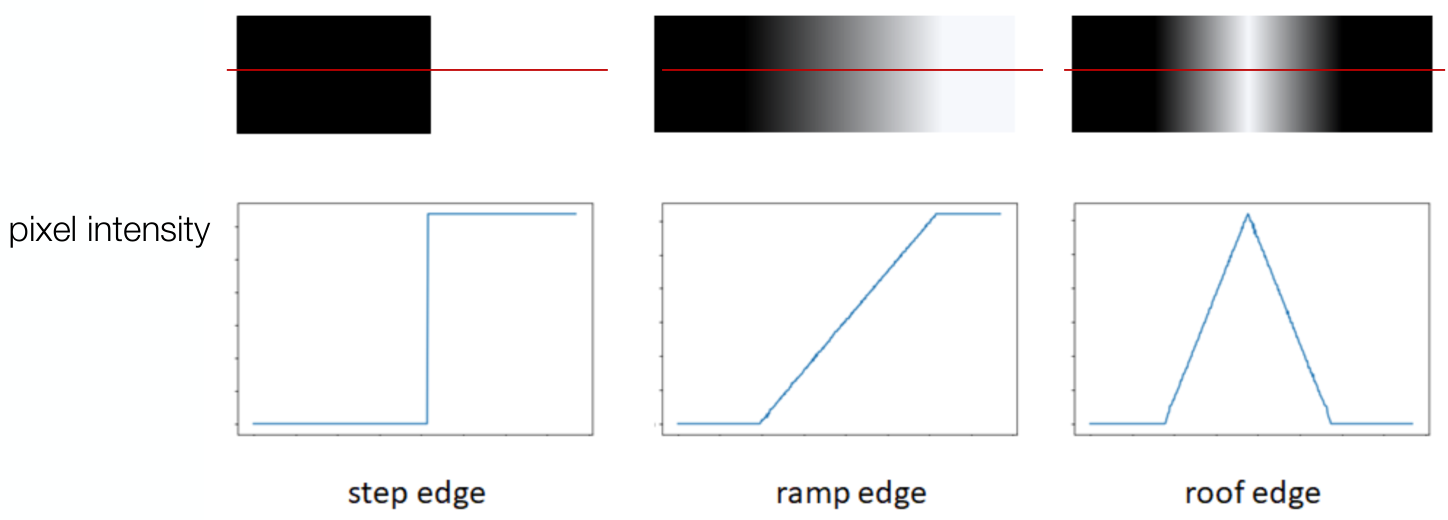
Intensity Variation at Edges
Gradients of Images
Image의 gradient $\nabla F$는 다음과 같이 정의된다.
\[\nabla F = \text{grad } F = \begin{bmatrix} \frac{\partial F}{\partial x} \\ \frac{\partial F}{\partial y} \end{bmatrix} = \begin{bmatrix} g_x \\ g_y \end{bmatrix} \approx \begin{bmatrix} F(x+1, y) - F(x, y) \\ F(x, y+1) - F(x, y) \end{bmatrix}\]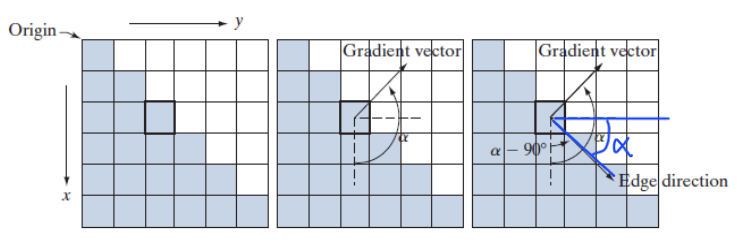
이 때, gradient를 $F(x,y)$ magnitude $M(x,y)$와 angle $\alpha (x,y)$로 분해할 수 있다.
\[M(x, y) = \sqrt{\left( \frac{\partial F}{\partial x} \right)^2 + \left( \frac{\partial F}{\partial y} \right)^2} = \sqrt{g_x^2 + g_y^2}\] \[\alpha(x, y) = \tan^{-1} \left( \frac{\frac{\partial F}{\partial x}}{\frac{\partial F}{\partial y}} \right) = \tan^{-1} \left( \frac{g_x}{g_y} \right)\]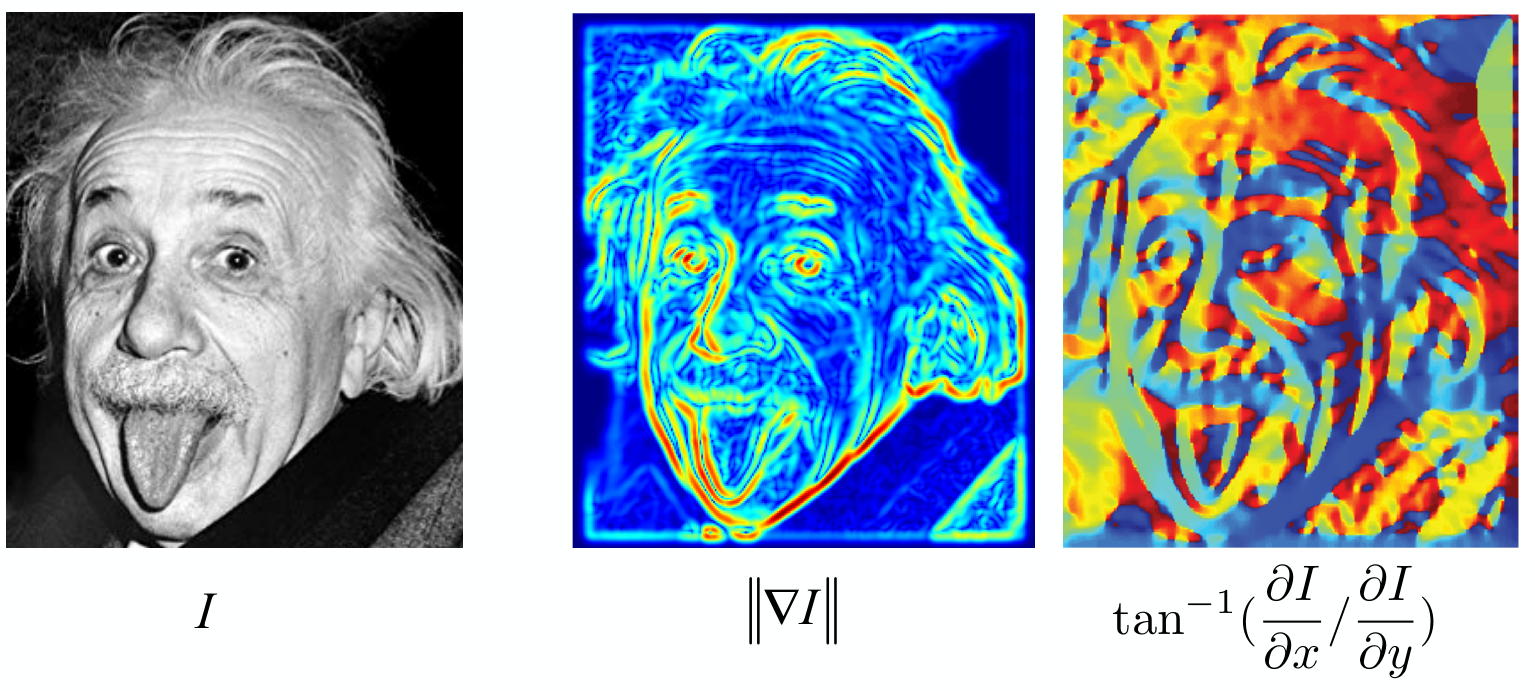
Edge Detecting Methods
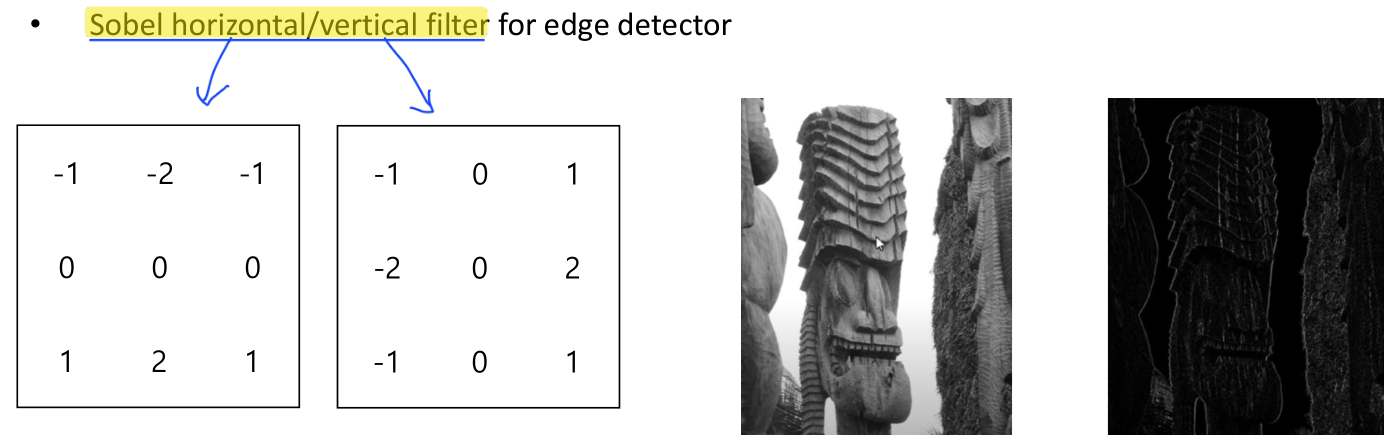
Sobel Filters
Sobel filter는 image의 1st derivative를 계산하는 필터이다. 가로/세로 방향의 filter가 각각 존재한다.
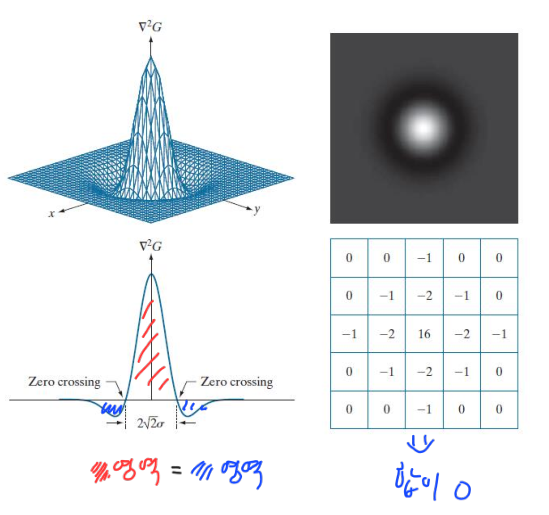
Laplacian of Gaussian
Laplacian of Gaussian(LoG)는 image에 Gaussian smoothing을 적용한 후에, Laplacian filter를 적용하는 방식이다. Laplacian filter는 Image의 2nd derivative를 계산하는 필터이다.
Gaussian filter $G(x,y)$를 정한다.
\[G(x, y) = e^{\frac{x^2 + y^2}{2\sigma^2}}\]LoG를 구한다.
\[\nabla^2 G(x, y) = \frac{\partial^2}{\partial x^2} G(x, y) + \frac{\partial^2}{\partial y^2} G(x, y)\] \[= \left[ \frac{x^2 + y^2 - 2\sigma^2}{\sigma^4} \right] e^{\frac{x^2 + y^2}{2\sigma^2}}\]
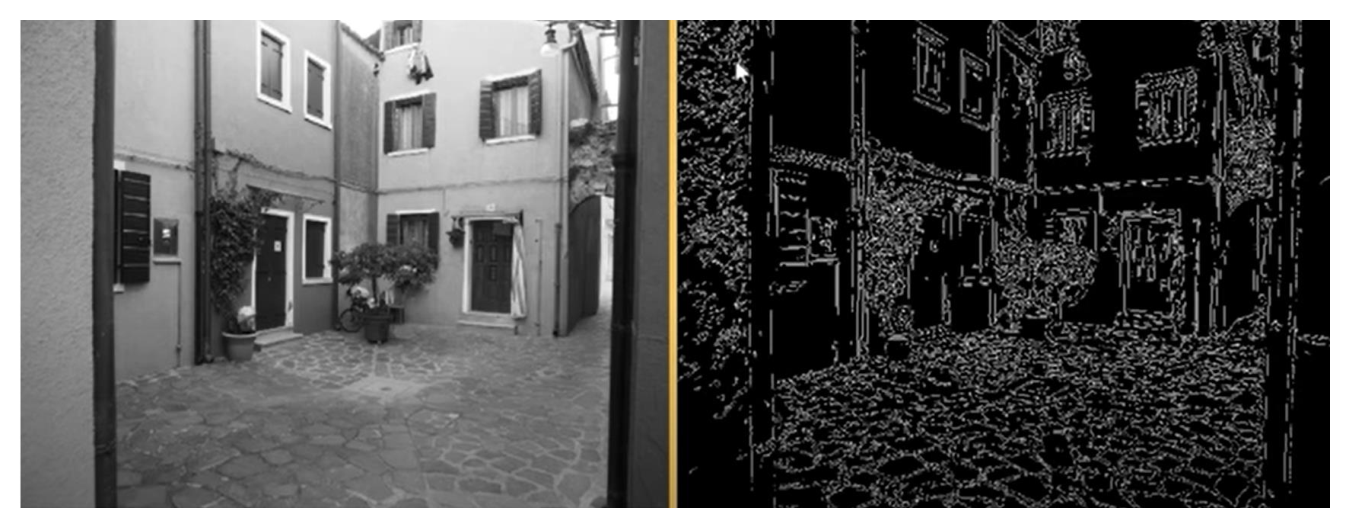
Canny Edge Detector
- Gaussian smoothing을 통해 image의 noise를 제거한다.
- Gradient (magnitude & angle)을 계산한다.
- Pixel이 gradient angle로부터 가장 큰 gradient magnitude를 갖는 local maximum인 경우에만 edge로 설정한다. (non-maximum suppression)
- 두 개의 threshold($I_H$, $I_L$)를 사용해 strong edge와 weak edge를 구한다.
- Strong edge와 weak edge 중 strong edge와 인접한 pixel들을 연결하여 edge를 완성한다. (edge linking)
주로 $I_H$는 $I_L$의 2~3배로 설정한다.
This post is licensed under CC BY 4.0 by the author.