Constrained Optimization
Constrained Optimization
General Constrained Optimization
\[\begin{aligned} & \text{minimize} & & f(x) \\ & \text{subject to} & & g_i(x) \le 0, \quad i=1,\dots,l\\ & & & h_j(x) = 0, \quad j=1,\dots,m\\ \end{aligned}\]- $f$ : objective function.
- $g_i$ : inequality constraints.
- $h_j$ : equality constraints.
- The set of $x$ that satisfies the constraints is called the feasible set.
- $A(x)={i:g_i(x)=0} \cup {j:h_j(x)=0}$ is called the active set.
- For a given point \(x^*\) and the active set \(A(x^*)\), if \(\{\nabla g_i(x^*), i \in A(x^*)\}\) are linearly independent, then it is said that the LICQ (Linearly Independence Constraint Qualification) holds.
When the LICQ holds, the gradient of the active constraint cannot be 0.
- The problem can be rewritten as:
- The Lagrangian of the problem is defined as follows:
Karush-Kuhn-Tucker (KKT) Conditions
Motivation for the KKT Conditions
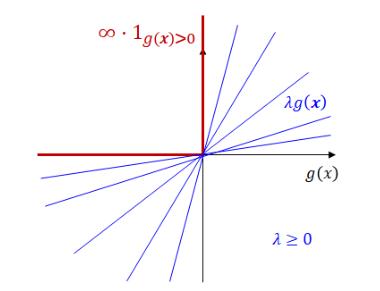
Consider an optimization problem with one inequality constraint.
\[\begin{aligned} & \text{minimize} & & f(x) \\ & \text{subject to} & & g(x) \le 0.\\ \end{aligned}\]This can be expressed as follows:
\[\begin{aligned} \text{minimize} \quad f_{\infty-step}(x) &:= \begin{cases} f(x) &\text{if } g(x)\le 0 \\ 0 &\text{if } g(x)> 0 \end{cases} \\ &= f(x) + \infty \cdot 1_{g(x)>0}. \end{aligned}\]Here, $f_{\infty-step} = \max\limits_{\lambda \ge 0}$ $L(x,\lambda)$ where $L(x,\lambda)= f(x) + \lambda g(x)$.
Therefore, the optimization problem is newly expressed as follows:
\[\min\limits_{x}\max\limits_{\lambda \ge 0}L(x,\lambda) := f(x)+\lambda g(x).\]KKT Conditions
Theorem: First-Order Necessary Conditions (KKT conditions)
Suppose that \(x^*\) is a local solution of constrained optimization problem and the LICQ holds at \(x^*\).
\[\begin{aligned} & \text{minimize} & & f(x) \\ & \text{subject to} & & g_i(x) \le 0, \quad i=1,\dots,l\\ & & & h_j(x) = 0, \quad j=1,\dots,m\\ \end{aligned}\]Then there is a Lagrangian multiplier vector \((\lambda^*, \nu^*)\), such that the following KKT conditions are satisfied at \((x^*, \lambda^*, \nu^*)\):
\[\begin{aligned} &\text{(1)} \quad \nabla_x L(x^*,\lambda^*,\nu^*) = \nabla_x f(x^*) + \sum_{i=1}^l\lambda_i^*\nabla_x g_i(x^*) + \sum_{j=1}^m\nu_j^*\nabla_x h_j(x^*) = 0 \\ &\text{(2)} \quad g_i(x^*) \le 0, \forall i \\ &\text{(3)} \quad h_j(x^*) = 0, \forall j \\ &\text{(4)} \quad \lambda_i^* \ge 0, \forall i \\ &\text{(5)} \quad \lambda_i^* g_i(x^*) = 0, \forall i \end{aligned}\]
Each condition is called as follows:
- (1): Stationarity condition
- (2), (3): Primal feasibility condition
- (4): Dual feasibility condition
- (5): Complementary slackness condition
Lagrangian Duality
Primal and Dual Problem
- Primal problem
or
\[\min\limits_{x}\max\limits_{\lambda \ge 0, \nu}L(x,\lambda,\nu) := f(x)+\lambda^T g(x)+\nu^T h(x)\]- Lagrangian Dual problem
Duality Theorem
Weak Duality
The optimal value of the dual problem is a lower bound of the optimal value of the primal problem.
Theorem: Weak Duality
Let $x$ and $(\lambda,\nu)$ be a feasible solution to primal and dual problems, respectively. Then $f(x) \ge D(\lambda,\nu)$. Moreover, if \(f(x^*)=D(\lambda^*,\nu^*)\), then \(x^*\) and \((\lambda^*,\nu^*)\) solves the primal and dual problems, respectively.
- Duality gap: \(f(x^*)-D(\lambda^*,\nu^*)\)
Strong Duality
For a convex optimization problem, the optimal values of the dual problem and the primal problem are the same.
Theorem: Strong Duality
Let $f,g_i$ be convex and $h_j$ be affine for all $i,j$. Then \(f(x^*) = D(\lambda^*,\nu^*)\) if the optimal value is finite.
- Affine functions $f(x_1,…,x_n)=A_1x_1+…+A_nx_n+b$ 형태의 function.
Wolfe Duality
By using strong duality, a given optimization problem can be expressed in a different form.
Theorem: Wolfe Duality
Let $f,g_i$ be convex, $h_j$ be affine for all $i,j$, and \(x^*\) be an optimal solution of the primal. Then \((x^*,\lambda^*,\nu^*)\) at which LICQ holds solves the Wolfe dual problem of the form
\[\begin{aligned} & \text{minimize} & & L(x,\lambda,\nu) \\ & \text{subject to} & & \nabla_xL(x,\lambda,\nu)=0\\ & & & \lambda \ge 0\\ \end{aligned}\]
$\nabla_xL(x,\lambda,\nu)=0$ is the condition for $L(x,\lambda,\nu)$ to be the local optima.
Linear and Quadratic Programming
Linear Programming (LP)
\[\begin{aligned} & \text{minimize} & & c^Tx \\ & \text{subject to} & & Ax=b\\ & & & x \ge 0\\ \end{aligned}\]- Lagrangian dual $L(x,\lambda,\nu) = c^Tx-\lambda^Tx+\nu^T(b-Ax)$ is convex.
- Therefore, the minimum is achieved when $c-\lambda-A^T\nu=0$ and $\lambda\ge 0$.
- Check that $c-\lambda-A^T\nu=0$ and $\lambda\ge 0$ $\Longleftrightarrow$ $A^T\nu \le c$.
- As a result, the dual problem is given by:
Quadratic Programming (QP)
\[\begin{aligned} & \text{minimize} & & \frac{1}{2}x^THx+d^Tx \\ & \text{subject to} & & Ax \le b\\ \end{aligned}\]where $H$ is symmetric and positive semidefinite. (Thus, the objective function is convex.)
- Lagrangian dual $L(x,\lambda) = \frac{1}{2}x^THx+d^Tx+\lambda^T(Ax-b)$ is convex.
- Therefore, the minimum is achieved when $Hx+A^T\lambda+d=0$ or $x=-H^{-1}(d+A^T\lambda)$.
- As a result, the dual problem is given by:
where $D=-AH^{-1}A$ and $c=-b-AH^{-1}d$.
This dual problem is simply a concave quadratic function maximization over a nonnegative domain, so it can be relatively easily solved.